Setting up OptiTrack
Links
Install
sudo apt install -y ros-melodic-mocap-optitrack
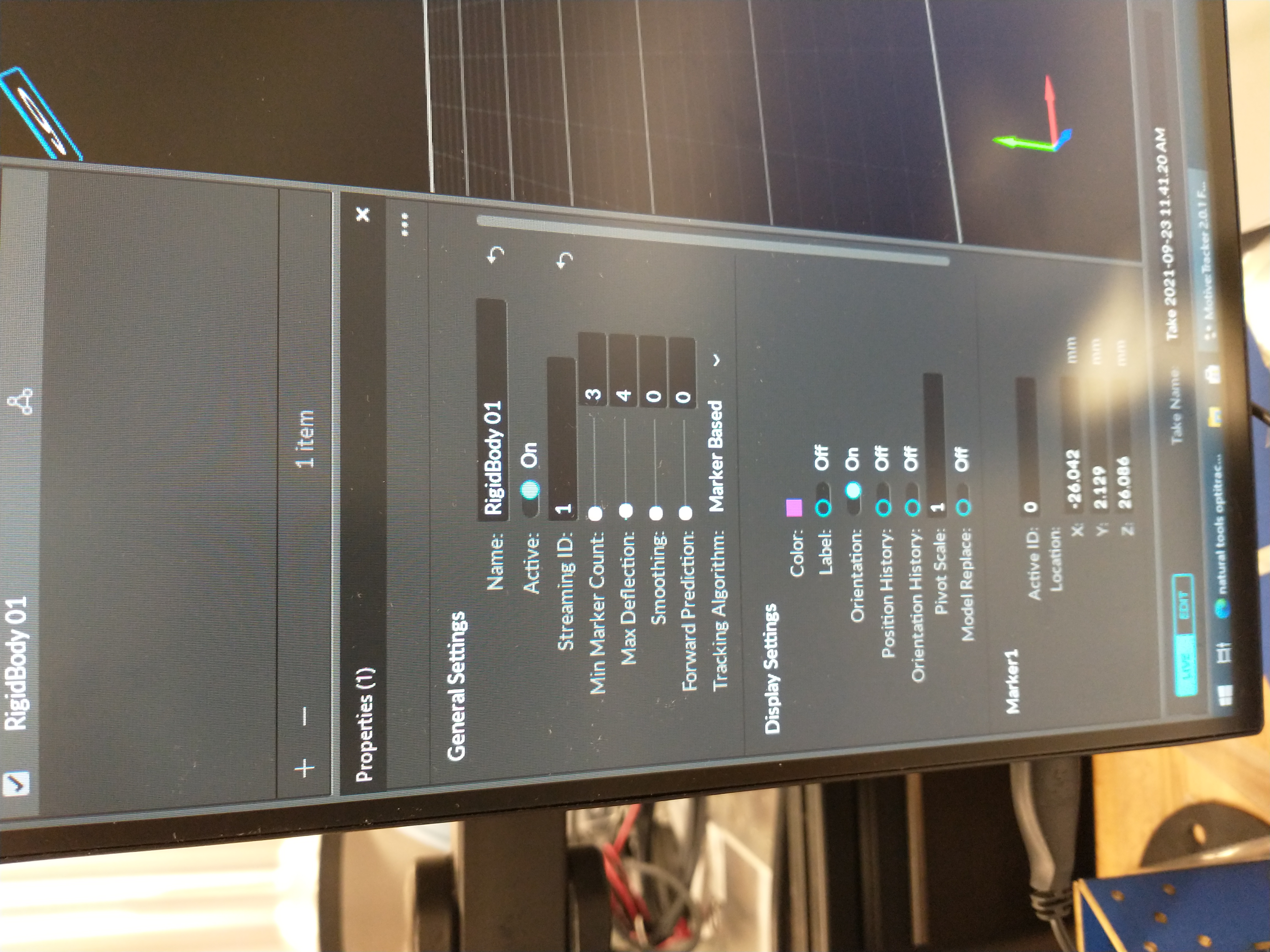
Create a rigid body and ensure it is being transmitted from Motiv
Edit mocap.yaml
roscd mocap_optitrack/config
nano mocap.yaml
#
# Definition of all trackable objects
# Identifier corresponds to Trackable ID set in Tracking Tools
#
rigid_bodies:
'1':
pose: Robot_1/pose
pose2d: Robot_1/ground_pose
odom: Robot_1/Odom
tf: tf
child_frame_id: Robot_1/base_link
parent_frame_id: world
# '2':
# pose: Robot_2/pose
# pose2d: Robot_2/ground_pose
# odom: Robot_2/Odom
# tf: tf
# child_frame_id: Robot_2/base_link
# parent_frame_id: world
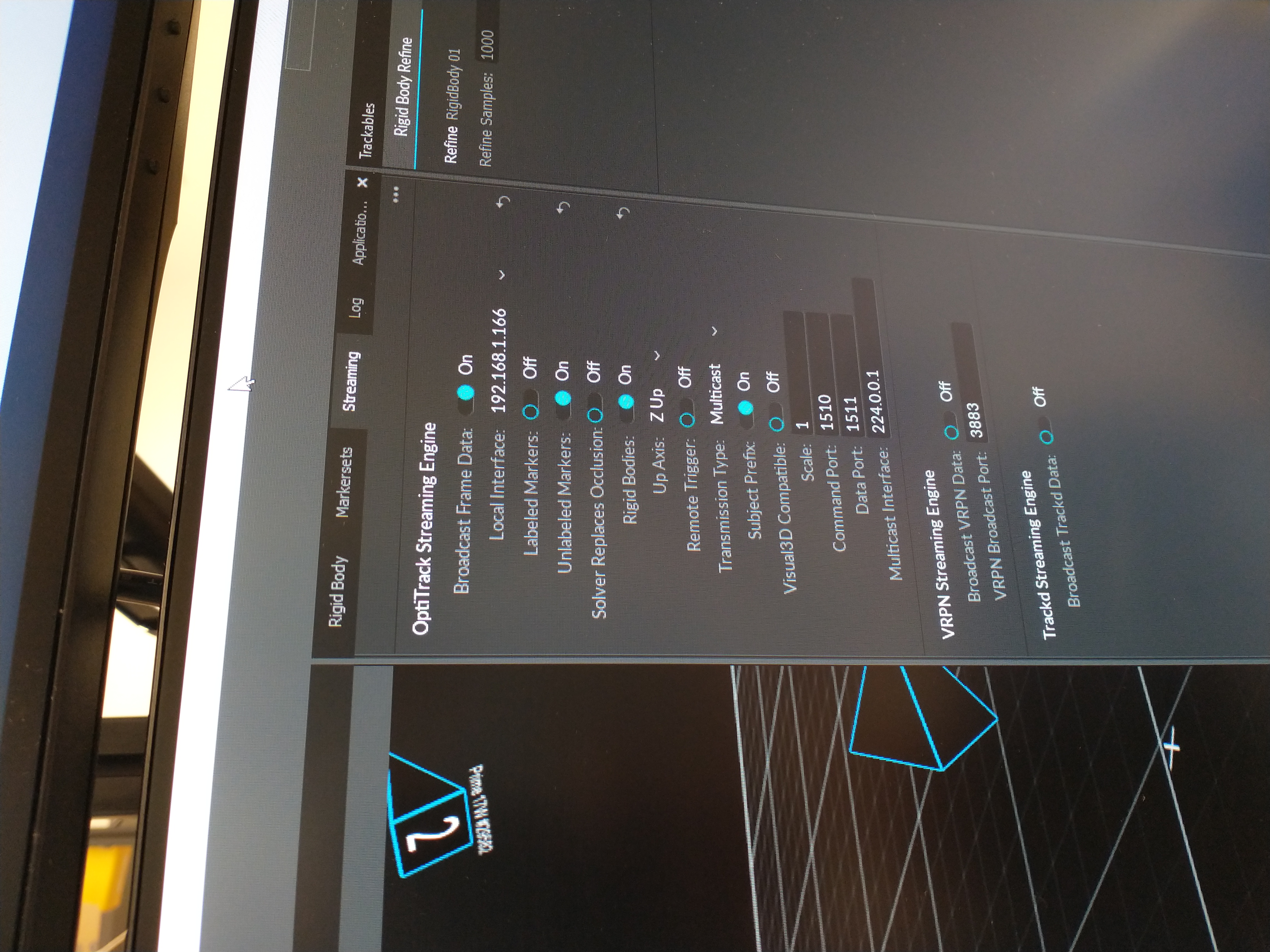
optitrack_config:
multicast_address: 224.0.0.1
command_port: 1510
data_port: 1511
enable_optitrack: true
Launch mocap
roslaunch mocap.launch
Subscribe to the pose topic
rostopic echo /mocap_node/Robot_1/pose
